Note
Click here to download the full example code
Modelling a Physical Channel in the Time Domain
This example uses the frequency domain lyceanem.models.time_domain.calculate_scattering() function to
predict the time domain response for a given excitation signal and environment included in the model.
This model allows for a very wide range of antennas and antenna arrays to be considered, but for simplicity only horn
antennas will be included in this example. The simplest case would be a single source point and single receive point,
rather than an aperture antenna such as a horn.
import numpy as np
import open3d as o3d
import copy
Frequency and Mesh Resolution
sampling_freq = 60e9
model_time = 1e-7
num_samples = int(model_time * (sampling_freq))
# simulate receiver noise
bandwidth = 8e9
kb = 1.38065e-23
receiver_impedence = 50
thermal_noise_power = 4 * kb * 293.15 * receiver_impedence * bandwidth
noise_power = -80 # dbw
mean_noise = 0
model_freq = 16e9
wavelength = 3e8 / model_freq
Setup transmitters and receivers
import lyceanem.geometry.targets as TL
import lyceanem.geometry.geometryfunctions as GF
transmit_horn_structure, transmitting_antenna_surface_coords = TL.meshedHorn(
58e-3, 58e-3, 128e-3, 2e-3, 0.21, wavelength * 0.5
)
receive_horn_structure, receiving_antenna_surface_coords = TL.meshedHorn(
58e-3, 58e-3, 128e-3, 2e-3, 0.21, wavelength * 0.5
)
Position Transmitter
rotate the transmitting antenna to the desired orientation, and then translate to final position.
lyceanem.geometry.geometryfunctions.open3drotate() allows both the center of rotation to be defined, and
ensures the right syntax is used for Open3d, as it was changed from 0.9.0 to 0.10.0 and onwards.
rotation_vector1 = np.radians(np.asarray([90.0, 0.0, 0.0]))
rotation_vector2 = np.radians(np.asarray([0.0, 0.0, -90.0]))
transmit_horn_structure = GF.open3drotate(
transmit_horn_structure,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
transmit_horn_structure = GF.open3drotate(
transmit_horn_structure,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector2),
)
transmit_horn_structure.translate(np.asarray([2.695, 0, 0]), relative=True)
transmitting_antenna_surface_coords = GF.open3drotate(
transmitting_antenna_surface_coords,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
transmitting_antenna_surface_coords = GF.open3drotate(
transmitting_antenna_surface_coords,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector2),
)
transmitting_antenna_surface_coords.translate(np.asarray([2.695, 0, 0]), relative=True)
Out:
geometry::PointCloud with 49 points.
Position Receiver
rotate the receiving horn to desired orientation and translate to final position.
receive_horn_structure = GF.open3drotate(
receive_horn_structure,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
receive_horn_structure.translate(np.asarray([0, 1.427, 0]), relative=True)
receiving_antenna_surface_coords = GF.open3drotate(
receiving_antenna_surface_coords,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
receiving_antenna_surface_coords.translate(np.asarray([0, 1.427, 0]), relative=True)
Out:
geometry::PointCloud with 49 points.
Create Scattering Plate
Create a Scattering plate a source of multipath reflections
reflectorplate, scatter_points = TL.meshedReflector(
0.3, 0.3, 6e-3, wavelength * 0.5, sides="front"
)
position_vector = np.asarray([29e-3, 0.0, 0])
rotation_vector1 = np.radians(np.asarray([0.0, 90.0, 0.0]))
scatter_points = GF.open3drotate(
scatter_points,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
reflectorplate = GF.open3drotate(
reflectorplate,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector1),
)
reflectorplate.translate(position_vector, relative=True)
scatter_points.translate(position_vector, relative=True)
Out:
geometry::PointCloud with 1024 points.
Specify Reflection Angle
Rotate the scattering plate to the optimum angle for reflection from the transmitting to receiving horn
plate_orientation_angle = 45.0
rotation_vector = np.radians(np.asarray([0.0, 0.0, plate_orientation_angle]))
scatter_points = GF.open3drotate(
scatter_points,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
reflectorplate = GF.open3drotate(
reflectorplate,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
from lyceanem.base_classes import structures
blockers = structures([reflectorplate, receive_horn_structure, transmit_horn_structure])
Visualise the Scene Geometry
Use open3d function open3d.visualization.draw_geometries() to visualise the scene and ensure that all the
relavent sources and scatter points are correct. Point normal vectors can be displayed by pressing ‘n’ while the
window is open.
mesh_frame = o3d.geometry.TriangleMesh.create_coordinate_frame(
size=0.5, origin=[0, 0, 0]
)
o3d.visualization.draw_geometries(
[
transmitting_antenna_surface_coords,
receiving_antenna_surface_coords,
scatter_points,
reflectorplate,
mesh_frame,
receive_horn_structure,
transmit_horn_structure,
]
)

Specify desired Transmit Polarisation
The transmit polarisation has a significant effect on the channel characteristics. In this example the transmit horn will be vertically polarised, (e-vector aligned with the z direction)
desired_E_axis = np.zeros((1, 3), dtype=np.float32)
desired_E_axis[0, 1] = 1.0
Time Domain Scattering
import scipy.signal as sig
import lyceanem.models.time_domain as TD
from lyceanem.base_classes import structures
angle_values = np.linspace(0, 90, 91)
angle_increment = np.diff(angle_values)[0]
responsex = np.zeros((len(angle_values)), dtype="complex")
responsey = np.zeros((len(angle_values)), dtype="complex")
responsez = np.zeros((len(angle_values)), dtype="complex")
plate_orientation_angle = -45.0
rotation_vector = np.radians(
np.asarray([0.0, 0.0, plate_orientation_angle + angle_increment])
)
scatter_points = GF.open3drotate(
scatter_points,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
reflectorplate = GF.open3drotate(
reflectorplate,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
from tqdm import tqdm
wake_times = np.zeros((len(angle_values)))
Ex = np.zeros((len(angle_values), num_samples))
Ey = np.zeros((len(angle_values), num_samples))
Ez = np.zeros((len(angle_values), num_samples))
for angle_inc in tqdm(range(len(angle_values))):
rotation_vector = np.radians(np.asarray([0.0, 0.0, angle_increment]))
scatter_points = GF.open3drotate(
scatter_points,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
reflectorplate = GF.open3drotate(
reflectorplate,
o3d.geometry.TriangleMesh.get_rotation_matrix_from_xyz(rotation_vector),
)
blockers = structures(
[reflectorplate, transmit_horn_structure, receive_horn_structure]
)
pulse_time = 5e-9
output_power = 0.01 # dBwatts
powerdbm = 10 * np.log10(output_power) + 30
v_transmit = ((10 ** (powerdbm / 20)) * receiver_impedence) ** 0.5
output_amplitude_rms = v_transmit / (1 / np.sqrt(2))
output_amplitude_peak = v_transmit
desired_E_axis = np.zeros((3), dtype=np.float32)
desired_E_axis[2] = 1.0
noise_volts_peak = (10 ** (noise_power / 10) * receiver_impedence) * 0.5
excitation_signal = output_amplitude_rms * sig.chirp(
np.linspace(0, pulse_time, int(pulse_time * sampling_freq)),
model_freq - bandwidth,
pulse_time,
model_freq,
method="linear",
phi=0,
vertex_zero=True,
) + np.random.normal(mean_noise, noise_volts_peak, int(pulse_time * sampling_freq))
(
Ex[angle_inc, :],
Ey[angle_inc, :],
Ez[angle_inc, :],
wake_times[angle_inc],
) = TD.calculate_scattering(
transmitting_antenna_surface_coords,
receiving_antenna_surface_coords,
excitation_signal,
blockers,
desired_E_axis,
scatter_points=scatter_points,
wavelength=wavelength,
scattering=1,
elements=False,
sampling_freq=sampling_freq,
num_samples=num_samples,
)
noise_volts = np.random.normal(mean_noise, noise_volts_peak, num_samples)
Ex[angle_inc, :] = Ex[angle_inc, :] + noise_volts
Ey[angle_inc, :] = Ey[angle_inc, :] + noise_volts
Ez[angle_inc, :] = Ez[angle_inc, :] + noise_volts
Out:
0%| | 0/91 [00:00<?, ?it/s]/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3604: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[0] = (
/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3609: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[1] = (
/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3614: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[2] = (
1%|1 | 1/91 [00:10<16:29, 11.00s/it]/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3604: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[0] = (
/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3609: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[1] = (
/home/timtitan/Documents/10-19-Research-Projects/14-Electromagnetics-Modelling/14.04-Python-Development/LyceanEM/lyceanem/electromagnetics/empropagation.py:3614: ComplexWarning: Casting complex values to real discards the imaginary part
global_vector[2] = (
2%|2 | 2/91 [00:14<09:24, 6.35s/it]
3%|3 | 3/91 [00:17<07:08, 4.87s/it]
4%|4 | 4/91 [00:21<06:41, 4.62s/it]
5%|5 | 5/91 [00:24<05:52, 4.10s/it]
7%|6 | 6/91 [00:27<05:20, 3.77s/it]
8%|7 | 7/91 [00:30<05:00, 3.57s/it]
9%|8 | 8/91 [00:34<04:46, 3.45s/it]
10%|9 | 9/91 [00:37<04:31, 3.31s/it]
11%|# | 10/91 [00:40<04:21, 3.23s/it]
12%|#2 | 11/91 [00:43<04:12, 3.16s/it]
13%|#3 | 12/91 [00:46<04:09, 3.16s/it]
14%|#4 | 13/91 [00:49<04:03, 3.13s/it]
15%|#5 | 14/91 [00:52<03:58, 3.10s/it]
16%|#6 | 15/91 [00:55<03:55, 3.10s/it]
18%|#7 | 16/91 [00:58<03:50, 3.08s/it]
19%|#8 | 17/91 [01:01<03:45, 3.05s/it]
20%|#9 | 18/91 [01:04<03:44, 3.07s/it]
21%|## | 19/91 [01:07<03:42, 3.09s/it]
22%|##1 | 20/91 [01:10<03:38, 3.08s/it]
23%|##3 | 21/91 [01:13<03:35, 3.07s/it]
24%|##4 | 22/91 [01:16<03:28, 3.02s/it]
25%|##5 | 23/91 [01:19<03:23, 2.99s/it]
26%|##6 | 24/91 [01:22<03:19, 2.98s/it]
27%|##7 | 25/91 [01:25<03:16, 2.97s/it]
29%|##8 | 26/91 [01:28<03:14, 2.99s/it]
30%|##9 | 27/91 [01:31<03:14, 3.04s/it]
31%|### | 28/91 [01:34<03:08, 2.99s/it]
32%|###1 | 29/91 [01:38<03:14, 3.14s/it]
33%|###2 | 30/91 [01:41<03:13, 3.17s/it]
34%|###4 | 31/91 [01:44<03:11, 3.20s/it]
35%|###5 | 32/91 [01:47<03:04, 3.13s/it]
36%|###6 | 33/91 [01:50<02:59, 3.10s/it]
37%|###7 | 34/91 [01:54<03:04, 3.24s/it]
38%|###8 | 35/91 [01:57<03:10, 3.41s/it]
40%|###9 | 36/91 [02:01<03:03, 3.34s/it]
41%|#### | 37/91 [02:04<02:53, 3.21s/it]
42%|####1 | 38/91 [02:07<02:50, 3.22s/it]
43%|####2 | 39/91 [02:10<02:44, 3.17s/it]
44%|####3 | 40/91 [02:13<02:42, 3.19s/it]
45%|####5 | 41/91 [02:16<02:37, 3.15s/it]
46%|####6 | 42/91 [02:19<02:29, 3.05s/it]
47%|####7 | 43/91 [02:22<02:22, 2.96s/it]
48%|####8 | 44/91 [02:25<02:17, 2.92s/it]
49%|####9 | 45/91 [02:27<02:13, 2.89s/it]
51%|##### | 46/91 [02:30<02:11, 2.91s/it]
52%|#####1 | 47/91 [02:33<02:06, 2.88s/it]
53%|#####2 | 48/91 [02:36<02:03, 2.86s/it]
54%|#####3 | 49/91 [02:39<02:00, 2.87s/it]
55%|#####4 | 50/91 [02:42<01:56, 2.85s/it]
56%|#####6 | 51/91 [02:45<01:53, 2.84s/it]
57%|#####7 | 52/91 [02:47<01:50, 2.83s/it]
58%|#####8 | 53/91 [02:50<01:46, 2.79s/it]
59%|#####9 | 54/91 [02:53<01:43, 2.79s/it]
60%|###### | 55/91 [02:56<01:40, 2.80s/it]
62%|######1 | 56/91 [02:58<01:37, 2.79s/it]
63%|######2 | 57/91 [03:01<01:34, 2.77s/it]
64%|######3 | 58/91 [03:04<01:30, 2.75s/it]
65%|######4 | 59/91 [03:07<01:28, 2.75s/it]
66%|######5 | 60/91 [03:09<01:25, 2.74s/it]
67%|######7 | 61/91 [03:12<01:22, 2.75s/it]
68%|######8 | 62/91 [03:15<01:20, 2.77s/it]
69%|######9 | 63/91 [03:18<01:18, 2.80s/it]
70%|####### | 64/91 [03:21<01:15, 2.80s/it]
71%|#######1 | 65/91 [03:23<01:12, 2.79s/it]
73%|#######2 | 66/91 [03:26<01:10, 2.82s/it]
74%|#######3 | 67/91 [03:29<01:07, 2.81s/it]
75%|#######4 | 68/91 [03:32<01:04, 2.82s/it]
76%|#######5 | 69/91 [03:35<01:02, 2.83s/it]
77%|#######6 | 70/91 [03:38<01:00, 2.86s/it]
78%|#######8 | 71/91 [03:41<00:57, 2.87s/it]
79%|#######9 | 72/91 [03:43<00:54, 2.89s/it]
80%|######## | 73/91 [03:46<00:52, 2.93s/it]
81%|########1 | 74/91 [03:50<00:50, 2.96s/it]
82%|########2 | 75/91 [03:52<00:47, 2.95s/it]
84%|########3 | 76/91 [03:55<00:43, 2.93s/it]
85%|########4 | 77/91 [03:58<00:41, 2.94s/it]
86%|########5 | 78/91 [04:01<00:38, 2.93s/it]
87%|########6 | 79/91 [04:04<00:35, 2.94s/it]
88%|########7 | 80/91 [04:07<00:32, 2.95s/it]
89%|########9 | 81/91 [04:10<00:29, 2.97s/it]
90%|######### | 82/91 [04:13<00:27, 3.05s/it]
91%|#########1| 83/91 [04:16<00:24, 3.08s/it]
92%|#########2| 84/91 [04:19<00:21, 3.05s/it]
93%|#########3| 85/91 [04:22<00:17, 2.99s/it]
95%|#########4| 86/91 [04:25<00:14, 2.95s/it]
96%|#########5| 87/91 [04:28<00:11, 2.92s/it]
97%|#########6| 88/91 [04:30<00:08, 2.71s/it]
98%|#########7| 89/91 [04:31<00:04, 2.19s/it]
99%|#########8| 90/91 [04:32<00:01, 1.76s/it]
100%|##########| 91/91 [04:33<00:00, 1.45s/it]
100%|##########| 91/91 [04:33<00:00, 3.00s/it]
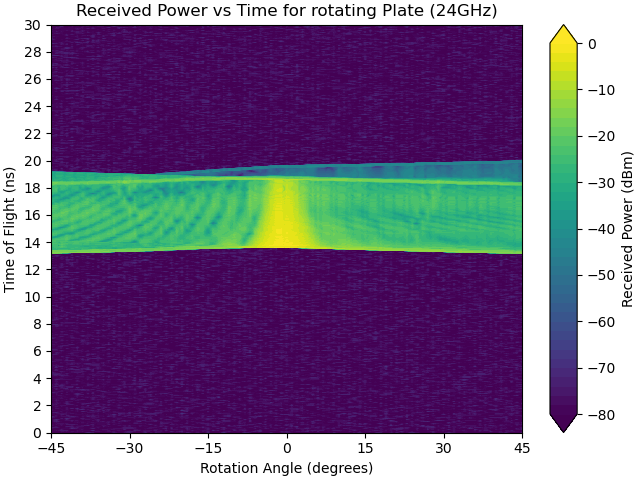
Plot Normalised Response
Using matplotlib, plot the results
import matplotlib.pyplot as plt
time_index = np.linspace(0, model_time * 1e9, num_samples)
time, anglegrid = np.meshgrid(time_index[:1801], angle_values - 45)
norm_max = np.nanmax(
np.array(
[
np.nanmax(10 * np.log10((Ex ** 2) / receiver_impedence)),
np.nanmax(10 * np.log10((Ey ** 2) / receiver_impedence)),
np.nanmax(10 * np.log10((Ez ** 2) / receiver_impedence)),
]
)
)
fig2, ax2 = plt.subplots(constrained_layout=True)
origin = "lower"
# Now make a contour plot with the levels specified,
# and with the colormap generated automatically from a list
# of colors.
levels = np.linspace(-80, 0, 41)
CS = ax2.contourf(
anglegrid,
time,
10 * np.log10((Ez[:, :1801] ** 2) / receiver_impedence) - norm_max,
levels,
origin=origin,
extend="both",
)
cbar = fig2.colorbar(CS)
cbar.ax.set_ylabel("Received Power (dBm)")
ax2.set_ylim(0, 30)
ax2.set_xlim(-45, 45)
ax2.set_xticks(np.linspace(-45, 45, 7))
ax2.set_yticks(np.linspace(0, 30, 16))
ax2.set_xlabel("Rotation Angle (degrees)")
ax2.set_ylabel("Time of Flight (ns)")
ax2.set_title("Received Power vs Time for rotating Plate (24GHz)")
from scipy.fft import fft, fftfreq
import scipy
xf = fftfreq(len(time_index), 1 / sampling_freq)[: len(time_index) // 2]
input_signal = excitation_signal * (output_amplitude_peak)
inputfft = fft(input_signal)
input_freq = fftfreq(120, 1 / sampling_freq)[:60]
freqfuncabs = scipy.interpolate.interp1d(input_freq, np.abs(inputfft[:60]))
freqfuncangle = scipy.interpolate.interp1d(input_freq, np.angle(inputfft[:60]))
newinput = freqfuncabs(xf[1600]) * np.exp(freqfuncangle(xf[1600]))
Exf = fft(Ex)
Eyf = fft(Ey)
Ezf = fft(Ez)
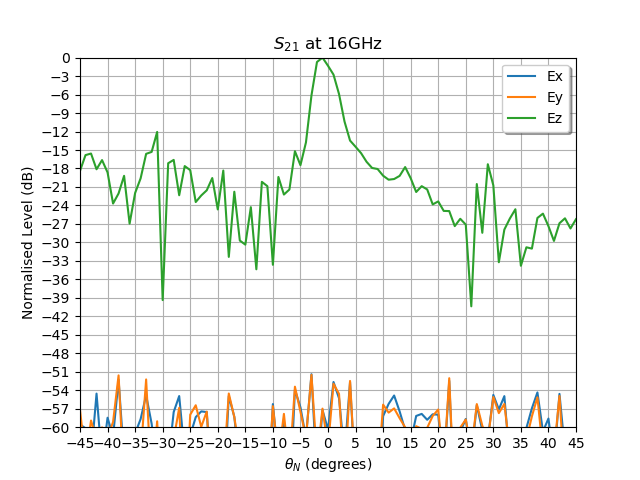
Frequency Specific Results
The time of flight plot is useful to displaying the output of the model, giving a understanding about what is physically happening in the channel, but to get an idea of the behaviour in the frequency domain we need to use a fourier transform to move from time and voltages to frequency.
s21x = 20 * np.log10(np.abs(Exf[:, 1600] / newinput))
s21y = 20 * np.log10(np.abs(Eyf[:, 1600] / newinput))
s21z = 20 * np.log10(np.abs(Ezf[:, 1600] / newinput))
tdangles = np.linspace(-45, 45, 91)
fig, ax = plt.subplots()
ax.plot(tdangles, s21x - np.max(s21z), label="Ex")
ax.plot(tdangles, s21y - np.max(s21z), label="Ey")
ax.plot(tdangles, s21z - np.max(s21z), label="Ez")
plt.xlabel("$\\theta_{N}$ (degrees)")
plt.ylabel("Normalised Level (dB)")
ax.set_ylim(-60.0, 0)
ax.set_xlim(np.min(angle_values) - 45, np.max(angle_values) - 45)
ax.set_xticks(np.linspace(np.min(angle_values) - 45, np.max(angle_values) - 45, 19))
ax.set_yticks(np.linspace(-60, 0.0, 21))
legend = ax.legend(loc="upper right", shadow=True)
plt.grid()
plt.title("$S_{21}$ at 16GHz")
plt.show()
Total running time of the script: ( 4 minutes 43.360 seconds)